
推进系统现在主要分为电动液压或者电动。一般来讲,电动液压机器人的重量和低功效的情况可以通过控制其重量在227kg以下来解决。当然更大的水下机器人,无论怎样,它有简单,易于包装,功能性强,可靠性高和低噪音的优点。当然如果不考虑在商业操作中实用性的限制,当考虑使用ROV完成任务时,电动液压机器人内在的高声学噪音可能是非常重要的,特别是用于军事水雷排查任务时。
典型的电驱动推进系统的每个推进器都使用独立的电动马达,尽管多个输出变速箱可以被一个马达驱动。在小型ROV中电动推进系统有非常明显的重量优势。
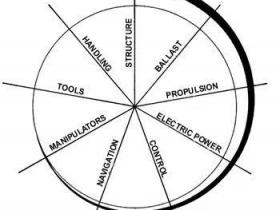
推进单元种类包括
- 带有定速马达的连续螺距推进器
- 变频交流驱动推进器
- 带有双极减速齿轮的交直流两用马达
- 无刷直流电动
- 永磁电刷式电动机
ROV可以被认为是一艘小型拖船,推进器必须倾斜安装以获得最好的系缆拉力,本质上就是推进器的最大静态推力。但是我们必须小心使用系缆拉力来决定推进器的需要。考虑系统效率的时候必须考虑到推进器的输出会随着速度的增加而减少的事实。最佳的倾斜安装方案决定了机器人的速度。因此,聪明的工程师会根据期望的水下机器人的速度使用备选推进器的设计曲线来决定推进器的尺寸和位置。
由于推进器周边的水环境,本质上是入口速度,将影响推进器的输出,因此推进器的位置非常重要。因此,水下机器人框架上的推进器的位置不是简单的捆绑问题。推进器尺寸和位置应该根据整个系统来考虑,包括推进器和其他子系统使用的能量平衡,以确保在极端情况下任何一个系统不会抢占另一个系统需要的输出能量。
推进器有不同的尺寸和配置,有电驱动的或液压驱动,通过直接驱动或者齿轮驱动,带或不带遮蔽物或者管道。一般的来讲,大多数推进器都有导管或者短管喷嘴来增加输出效率。
市场宣传资料显示的输出马力范围从30到100磅每轴马力输入。很明显,为了达到最佳的性能,推进器的设计曲线应该根据系统集成的情况进行评估并进行适当的调整。一种被用来评估推力和功率需要的经验法则是每匹马力为35到40磅的推力,无论怎样,看来科技已经使‘现代法则’更大。







评论