
一、探地雷达发展历史
探地雷达始于1910年,源于德国,用于探测地下相对高导电性质的区域。
1926年,德国专家提出脉冲技术确定地下结构的思路。
1960年,Cook将脉冲雷达应用于矿井中。
1970年,雷达用于南极冰盖探测。
70年代末,雷达技术成熟,并进行商用生产。
二、探地雷达方法简介
探地雷达(GPR)方法是一种用于确定地下介质分布的广谱(10MHz~3GHz)电磁技术。一个天线发射高频宽频带电磁波,另一个天线接收地下介质界面的反射波。利用回波的回程时间、振幅和波形资料等运动学和动力学特征来分析和推断介质结构和物性特征。
三、探地雷达特点
发射天线和接收天线间距小,当地层倾角不大时,反射波路径与地层垂直。
工作效率高,可以实时反应地下介质情况。
电磁波传播理论与弹性波的传播理论类似。
四、天线分类
- 以频率划分为低频、中频和高频
- 以结构特点又划分为非屏蔽、屏蔽天线
- 以电性参数分有偶极子天线、反射器偶极子天线、喇叭状天线
- 按其耦合类型可分为 :地面耦合和空气耦合型
- 低频天线:频率在100MHz及以下的天线,工程检测中多用于超前预报及空洞溶洞探测。
- 中频天线:频率在100MHz-1000MHz,采用屏蔽式半波偶极子天线。具有天线体积小,发射效率高的特点。在工程勘查与检测中常使用该类天线,包括200MHz、400MHz、600MHz、900MHz。
- 高频天线:频率在1GHz以上的天线。 工程中用于桥梁路基等结构体检测
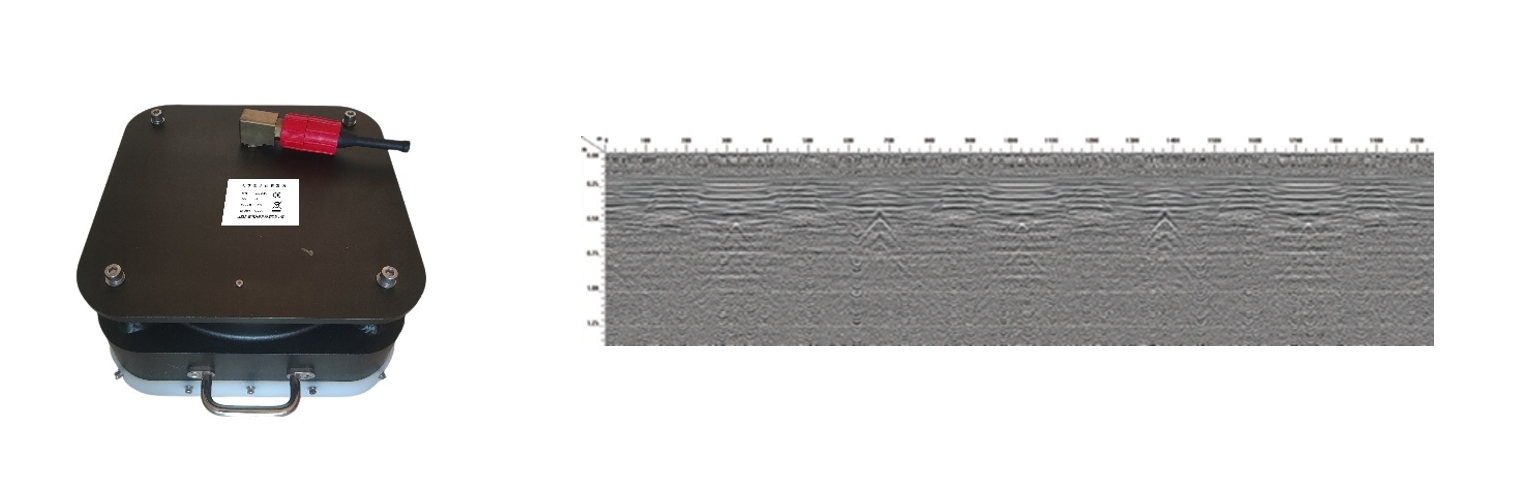
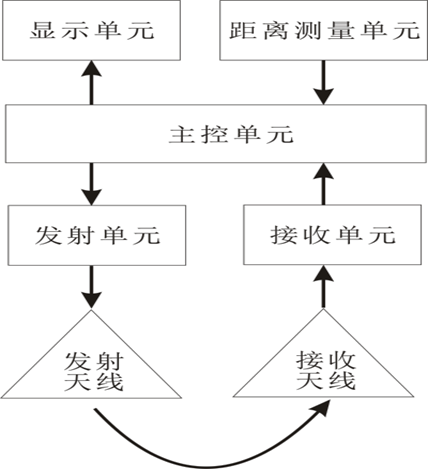
五、系统组成
探地雷达结构如下图所示,主要分五部分组成。
主控单元
显示单元
发射单元
发射天线
接收单元
接收天线
距离测量单元
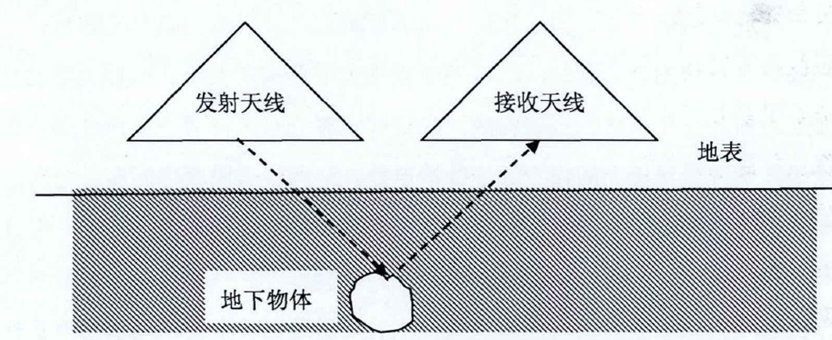
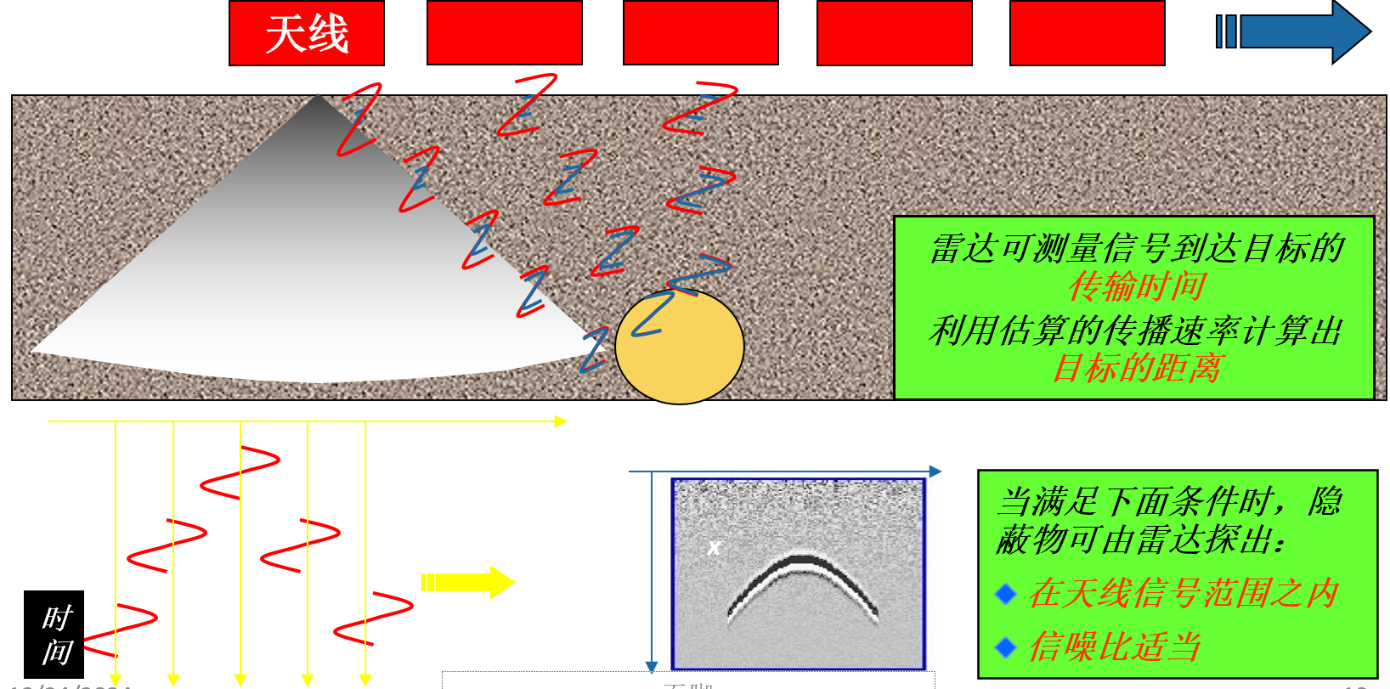
六、工作原理
一个天线发射高频宽频带电磁波,另一个天线接收地下介质界面的反射波。利用电磁破在不同介质中的速度差异导致的回波回程时间不同,可以推断出介质的结构。
七、主要参数介绍
1、中心频率与带宽
频率与频带宽度是天线重要技术指标,关系到天线的分辨大小与探测深度的能力。探地雷达天线均采用为高宽带雷达天线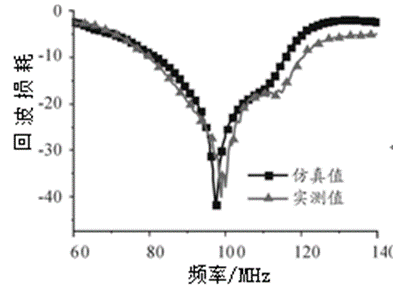
2、分辨率
分辨率是指探地雷达分辨最小异常介质的能力,它分为垂直分辨率和水平分辨率。
1)、垂直分辨率
探地雷达剖面中能够区分两个最近反射界面的能力成为垂直分辨率。理论上我们把四分之一波长作为分辨率极限,层厚度大于此则可分辨率,否则就不能分辨;但实际应用中,由于各方面的原因,我们所得到的分辨率要小于此值。雷达探测的实际分辨率受多方面的因素影响,它不但与所使用来探测的波的波长有关,而且还与所通过的介质的吸收有关,与所在场地的干扰程度有关,与所探测目标界面的反射系数有关。
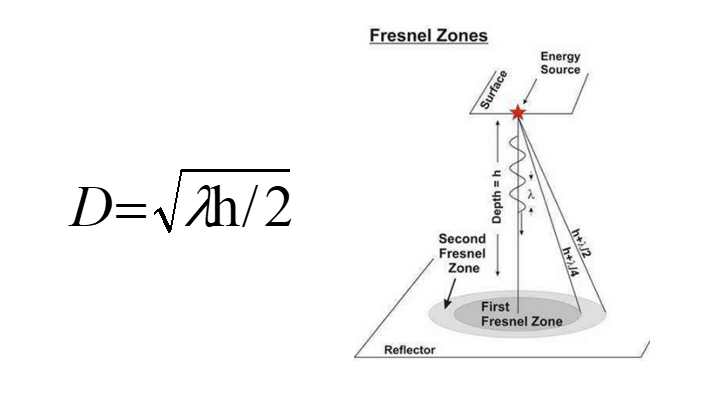
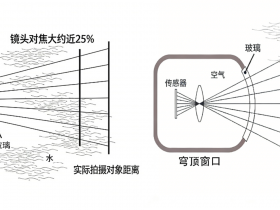
2)、水平分辨率
探地雷达的水平分辨率是指在水平方向上所能分辨的最小异常体的尺寸。在物理学上使用菲涅尔带来说明该参数,如右图所示。从图中可以得出,水平分辨率与深度及波长都有关系,使用第一菲涅尔带直径D的1/4为其最小水平分辨率。
3、波速
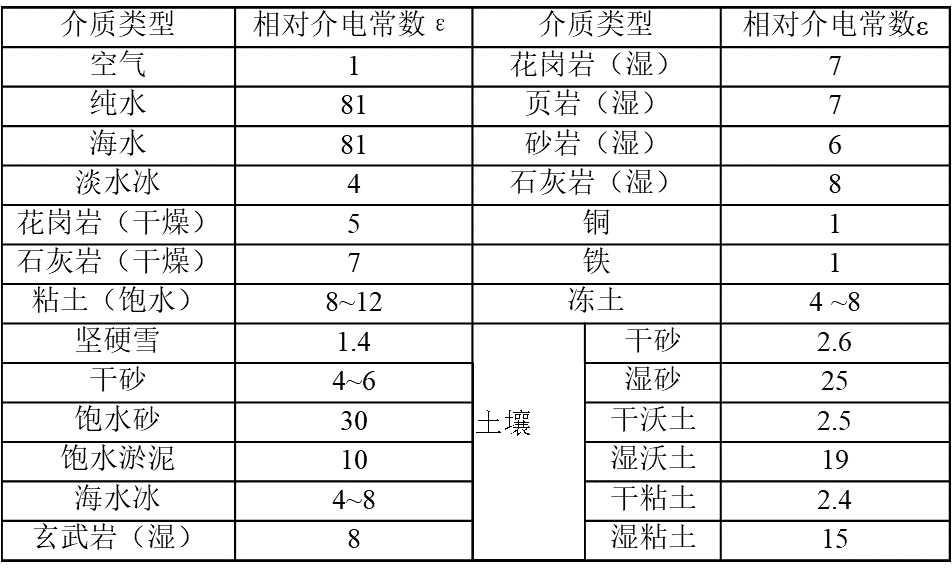
式中C为真空中电磁波传播速度(常数:C=0.3m/ns)。ε'为相对介电常数。知道探测目标的相对介电常数,即可按上述关系求取电磁波速度v。下表为几种常见介质的相对介电常数ε'与地层电磁波传播速度v的参考值。
4、介电常数
介电常数是一个无量纲物理量,它表征一种物质在外加电场情况下,储存极化电荷的能力。自然界中物质的介电常数最大的物质是水,介电常数为81,最小的是空气,数值为1。工程状态下的岩土介质,其介电常数的主要差异决定其含水量的大小。介电常数不同的两种介质的界面,会引起电磁式波的反射,反射波的强度与两种介质的介电常数及电导率的差异有关。常用介电常数如下表所示。
八、探地雷达测量参数选择
1、时窗(纳秒)
时窗的选择是最重要的,选择的太小会丢失有用数据,选择太大会降低垂直分辨率。一般选取探测深度为目标深度的1.5倍。根据探测深度D和介电常数ε确定采样时窗长度,深度和时窗fwin的关系:
2、采样点数
采样点数是影响垂直分辨率的一个重要参数,采样点数太小难以反应真实情况,太多则会影响采集速度,同时由于探地雷达天线波长限制,太高的采样点数并不会产生真正的效果。一般选取512点或1024点足够满足采集现场。
3、 扫描速率
扫描速率是表示在1秒钟内,探地雷达可以发射并采集多少道数据,该 参数是直接影响水平分辨率的参数,同时也决定在测试时天线移动的最高速度。
为保证可以有效探测到目标体,穿过目标体的数据至少要达到20道或更高。假设探测目标 体最小尺寸为20厘米,天线移动速度为1米/秒,所以要求探地雷达的扫描速率至少为100道/秒。
4、时变增益
通常从介质反射回来的信号非常微弱,深度越深信号越小,所以要对不同深度反射回来的信号进行不同的放大,这样在视觉才便于使用分析。
- 滤波
滤波的目的是为了将有用信号保留将无用信号滤除,方便数据分析使用,所以选择合适的滤波参数是得到最有用信号的有效方法。
九、探地雷达工作模式
点测模式
使用在隧道超前预报或测试环境复杂的地方。
连续模式
普遍使用在管线探测和隧道衬砌检测等位置。
DMI模式
使用在需要精确定位的场合。
十、产品分类

十一、水下探地雷达面临的问题
1、电磁波传播受限:水会大大消弱电磁波的传播能力,导致雷达在水下的探测距离受到很大限制。
2、频率和波长受影响:水对电磁波的频率和波长会造成一定的影响,会降低雷达的探测效果,包括距离和分辨率。
十二、解决水下雷达检测问题的方法
1、通过降低频率增加探测距离
2、提高发射和接收天线的信噪比,降低电磁波衰减问题,增加探测距离
3、提高能量聚焦方向增加探测距离
4、提高信号处理和软件后处理能力来解决频率降低带来的分辨率降低问题
十三、水下探地雷达主要应用领域
1、水电站大坝检测
2、水库大坝检测
3、桥墩基础检测
4、堤防检测
5、防浪堤检测
6、隧洞衬砌完整性检测







评论