
在水下探索与监测中,相机技术直接影响数据采集的质量与效率。传统模拟、复合、SDI及IP相机已广泛应用于水下场景,但USB水下相机正展现出显著的竞争优势。本文从计算机视觉集成、延迟、功耗、尺寸等方面对比分析,阐述USB水下相机方案的优势。
计算机视觉集成与图像质量
USB水下相机采用数字接口,输出高质量图像,避免模拟/复合信号的传输衰减问题。还可与计算机视觉系统无缝集成,支持机器学习、目标识别和3D建模等应用,简化了数据处理流程。
低延迟性能
相较于IP水下相机数据传输所带来的延迟(通常约200毫秒),USB水下相机省去中间环节,延迟显著降低,部分场景下可降至一半以下。这对水下机器人(ROV/AUV)的实时控制与响应至关重要,提高了作业精度与安全性。
低功耗优势
在水下环境中,电源精细管理对AUV和ROV至关重要。USB水下相机因其简单的数据传输和较低的处理需求,功耗通常低于IP或模拟相机。这种低功耗特性在长时间任务或电源受限的场景下尤为关键,有助于延长作业时间,减少充电或更换电源的频率。
紧凑设计与连接简化
USB水下相机结构紧凑,可在狭小空间集成或部署多相机系统,扩大观测范围且对设备浮力影响小。USB接口将数据与控制信号整合于单一4针接口中,简化布线;而传统水下相机常需额外接口调整参数,增加了系统复杂性与故障风险。

小型USB水下相机
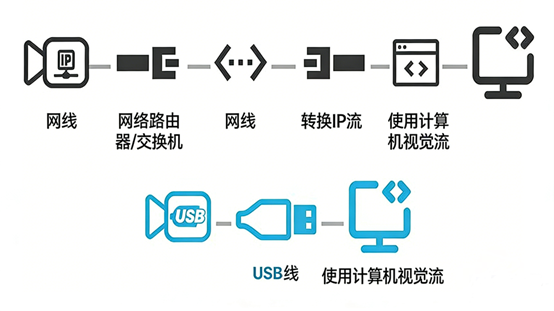
网络架构与成本效益
IP水下相机需外接以太网设备,USB水下相机可直接连接单板计算机(SBC),统一管理并转换为IP流,实现低功耗、低延迟的多路传输。其连接器结构简单、线缆更细,在同等预算下可部署更多相机。(如需IP通讯我们也可提供完整方案)
累计优势
USB水下相机通过简化布线(数据与控制合一)、低功耗设计与紧凑结构,显著提升了系统集成度与成本效益。通过单板计算机(SBC)直接连接进行多路管理,支持计算机视觉集成,有效优化水下探测的可靠性、部署灵活性和操作效率。
现有解决方案
explore HD 3.0水下相机搭载索尼传感器,结合AI图像处理技术,在低光环境下表现优异且色彩还原真实,支持即插即用。配套水下视觉计算机可同时连接多达七台USB相机,并将其转换为低延迟的UDP流。用户能通过软件调控相机参数,是构建紧凑型多相机水下探测系统的理想选择。
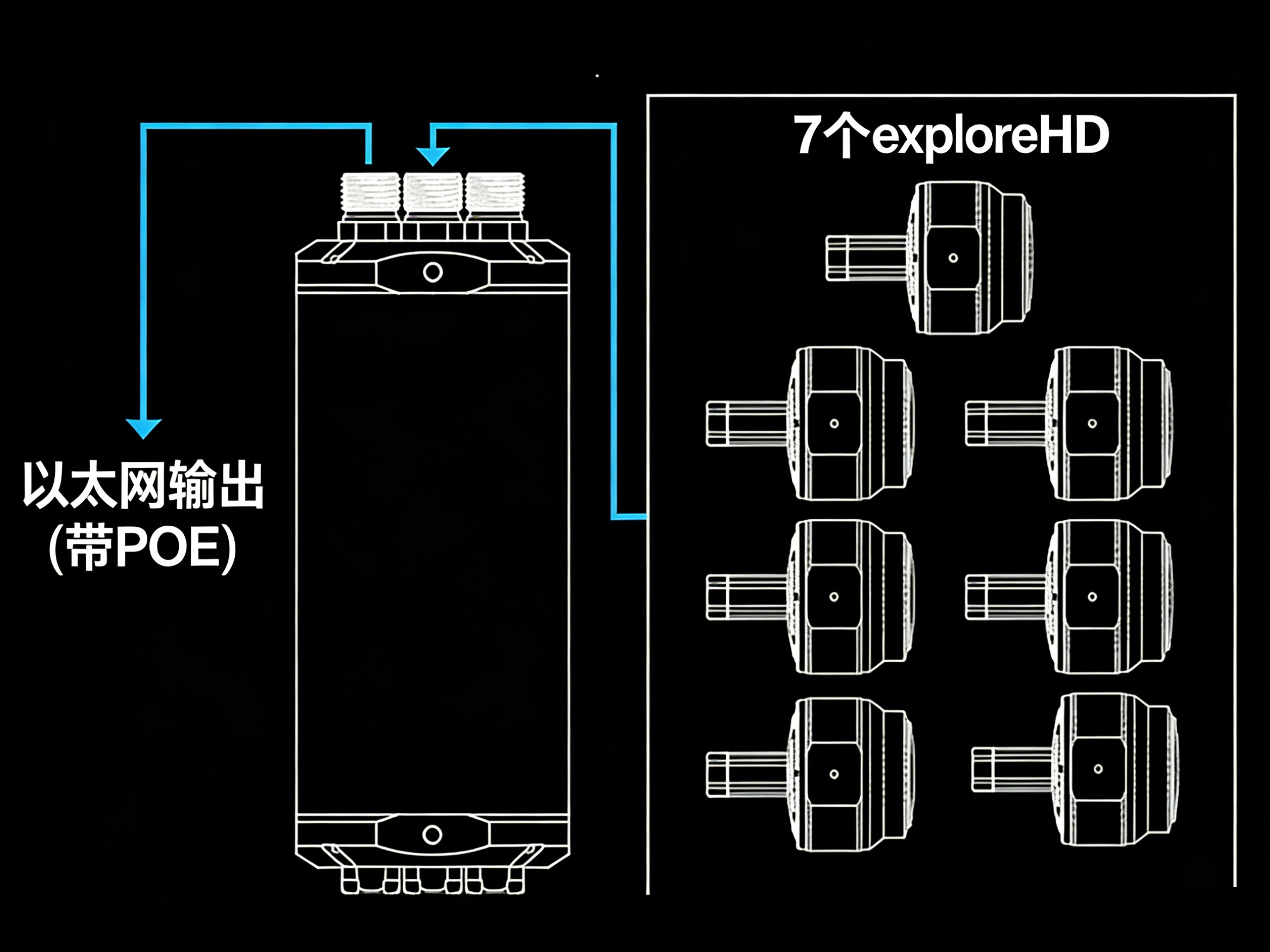
多台USB水下相机串联
结论
USB水下相机在集成便捷性、低延迟、节能性、紧凑性及成本方面均优于传统模拟、复合、SDI与IP方案,尤其适合高要求的计算机视觉水下应用。其推广将推动水下探测与作业能力进一步提升,为海洋研究与工业应用提供更强支撑。






评论